

 La page des Photos
La page des Photos La page des Vidéos
La page des VidéosLe moteur Stirling
| Historique |
| Principe de fonctionnement |
| Les différents moteurs |
| Le L.D.T. |
| Mon moteur Stirling |
| Ma pompe Stirling |
Ecologie
| Le solaire |
| L'éolien |
| le MCE-5 |
| Le réacteur pantone |
| Le Bio-Ethanol (e85) |
Divers
| Les microcontroleurs |
| Expériences |
| STAR TREK (new) |
| En Vrac |
| Liens
|
Partenaire
|
Créer votre blog Créer un site EOL le blog de l'éolien |
L'automate Numérique
Pour ceux qui sont curieux de voir comment on peux utiliser peu de composants pour faire un automate programmable, l'ancêtre des micro-controleurs en somme, regarder ci-dessous. d'ailleurs comprendre un système basique comme celui-ci vous permettra sans doute de mieux appréhender le cours de Bigonoff sur les Pics.
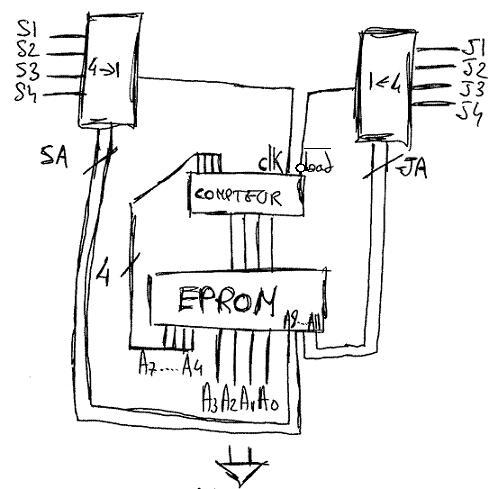
Nous avons donc 2 multiplexeurs 4->1, celui de gauche sera dédié aux tests de continuïté de programme, l'autre aux sauts d'adresses. C'est à dire que les signaux détectés par le mux de gauche fera incrémenter le compteur de 1, donc incrémenter l'adresse du programme contenu dans l'Eprom de 1.
Une Eprom, enfin une mémoire morte, c'est vous qui choisissez ici ce n'est qu'un exemple. Bus d'adresse de 4 bits, bits de données de 12 bits. Un compteur 4 bits, l'horloge (clk du compteur, active sur front montant, 0->1) sur la sortie du mux de gauche et l'entrée Load (Active sur front descendant, permettant de charger le nombre binaire situé sur A7...A4) sur la sortie du Mux de droite. Les sorties A11....A8 pilotent les adresses des Muxs. A11, A10 pour le JA (jumper adress). A8,A9 pour le SA (Suivre adresse).
Les sorties A3.....A0 servent à commander un système.
Imaginons le système suivant :

S1 sera relié aux entrées S1 et J1.
S2 sera relié aux entrées S2 et J2.
S3 sera relié aux entrées S3 et J3.
S4 sera relié aux entrées S4 et J4.
Des objets viennent sur un tapis roulant commander par A0 (1=roule, 0=stop).
Ces objets n'ont pas tous la même taille, il faut éjecter ceux qui sont plus petits que l'écart qu'il y a entre S1 et S2.
A3 commande les émetteurs pour les capteurs S1 et S2 (1= allumé, 0= éteint), idem pour A2 mais pour S3.
A1 commande l'éjecteur (1=en route, 0=arrêt),le capteur S4 permet de savoir si le cycle d'ejection est terminé (Front descendant=fin de travail, 1=en cours).
Les capteurs S1, S2 et S3 permettent de savoir si un objet se situe devant (1=il y a quelque chose, 0= il n'y a rien), quand un objet "apparaît" devant le capteur nous aurons donc un front montant et inversement.
Lorsque l'objet est au moins aussi grand que l'écart S1-S2 le tapis roule jusqu'à un aute objet pour identification. Quand il est plus petit
---> Ejection.
Algorithme de ce système.

A3=1 -> Mise en route des Lampes de controles S1, S2
A0=1 -> Mise en route du Tapis
A2=0 -> Lampe de controle S3 éteinte
A1=0 -> Ejecteur en arrêt
TEST de S1 ? si S1 détecte un objet on passe, aussi non on boucle.
Double test, en effet si l'objet est détecté par S2 avant que S1 passe à l'état bas (front descendant), c'est que celui-ci est au moins de la taille de l'écart S1-S2. Si S1 passe à '0' avant que S2 ne passe à '1' c'est que l'objet en plus petit que l'écart.
Je pense que pour la suite vous avez bien appréhendé le processus.
Maintenant nous pouvons passer à la programmation de l'Eprom pour effectuer l'algorithme du dessus.
Tableau de programmation de L'Eprom :

Explications du Tableau :
Ligne 0 -> SA sur entrée S1, quand S1 passera à '1' le compteur incrémentera l'adresse du programme (ligne suivante).
Ligne 1 -> SA sur S2 et JA sur J1, si S2 passe à '1' avant que S1 passe à '0' le compteur incrémentera l'adresse du programme.
Si S1 passe à '0' avant que S2 en passe à '1', le compteur sera chargé par l'adresse '1010', c'est à dire 10.
Le programme se retrouvera donc à l'adresse 10, c'est un saut d'adresse.
Ligne 2 -> On pointe Ja sur l'entrée de S3, quand celui-ci passera à '0' (front descendant) c'est que l'objet vient de dépasser le capteur S3, puis le compteur se verra charger de la valeur '0000' et le programme recommencera puisque nous serons à l'adresse '0000'. Ici SA pointe sur l'entrée S4 car on sait qu'à cette étape rien ne va se passer sur S4, on focalise sur un saut et pas un continuïté de programme.
Ligne 3 à 9 -> Adresses libres pour changements éventuels, ou rajouts.
Ligne 10 -> JA sur J4 parce qu'on focalise ici sur la continuïté et pas sur un saut. SA sur S3, dès que S3 passe à '1' le programme verra son adresse s'incrémenter, donc rendez-vous ligne suivante.
Ligne 11 -> On arrête le tapis (l'objet est normalement à l'endroit de l'Ejecteur), on arrête les lampes (Economie), on mets en route l'Ejection. SA pointe sur S1 car on focalise sur un saut (rien ne se passera sur S1). JA pointe donc sur S4, dès la détection du front descendant de S4 signifiant la fin de travail de l'Ejecteur, l'adresse '0000' sera chargé dans le compteur, le programme est bouclé.
Pour ceux qui connaissent l'Hexadécimale, voici le programme sous cette forme :
00 : $009
01 : $1A9
02 : $B05
03 :
04 :
05 :
06 :
07 :
08 :
09 :
0A : $E05
0B : $C02
Marrant, non ?
J'espère que tout cela vous a fait comprendre quelques notions supplémentaires, surtout avant de commencer le cours de Bigonoff, quoique même connaissant le cours, je pense que ce petit montage est très instructif mais nécessite qu'on y réfléchisse. Après tout, on a rien sans rien !!
Vous comprenez rapidement que pour beaucoup de systèmes automatisés, il n'est pas forcément nécessaire d'utiliser un microprocesseur ou micro-contrôleur, 4 composants de bases suffisent amplement !!!!
©2011 Leaky
Amis : faire un blog
Amis : faire un blog